 机器人(臂)
机器人(臂) 
 询价
询价
 视频
视频
更多视频

技术特性/ Technical Characteristics
适合上下料、搬运、切割、点胶、测量、装配及焊接应用。此外,该机器人采用“所编即所得”的编程机制,尽可能缩短了编程时间和周期时间。当新程序或新产品上线时,上述编程性能均有助于加快调试过程、缩短停线时间
采用优化设计,机身紧凑轻巧,加速度迅速,结合其运行速度,所获周期时间与行业标准相比可缩减25%。操作中,机器人在避绕障碍物和跟踪路径时,可始终保持最高加速度,从而提高产品与效率
大工作范围,能实现到达距离,周期时间、辅助设备等诸方面的综合优化。该机器人可灵活采用落地、斜置、半支架、倒置等安装方式,为模拟工艺布局提供了便利
占地面积小,轴转座半径短,后方肘部纤细,上下臂小巧,手腕紧凑,在规划生产单元的布局时,可以与机械设备靠得更近,从而缩小整个工作站的占地面积,提高单位面积产量,推升工作效率

详细参数/ Detailed Parameters
规格选择:
| 型号 | IRB460-110/2.4 |
| 码垛荷重(Kg) | 110 |
| 拆垛工作范围(m) | 2.4 |
| 物料搬运防护等级 | Ip67 |
| 安装方式 | 落地 |
| RP(mm) | 0•20 |

定制服务/ Customized Service

适用范围/ Scope of Application
替代各类人工操作的搬运、堆垛等


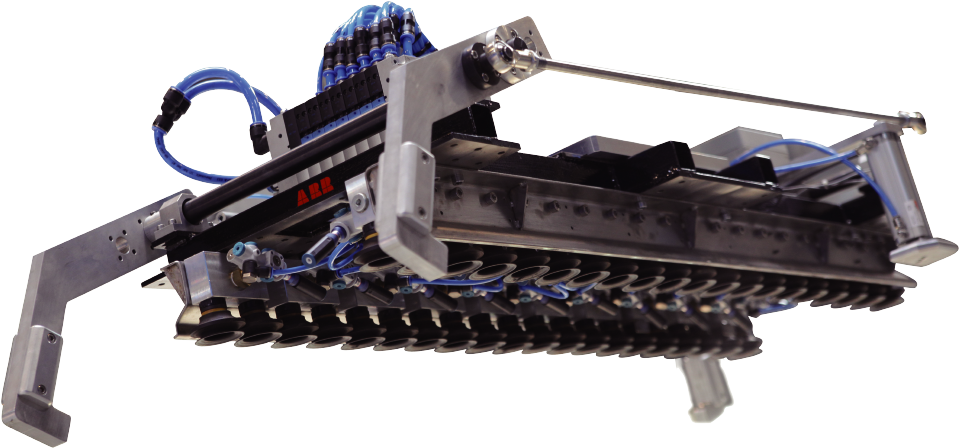
10个独立可控真空区,单次可搬运5件产品
可选配内置货盘抓料器
配备传感器检测物料是否到位,配备可调节真空导轨,适合不同尺寸箱盒
配备安装板及全套管线,即插即用
搭配示教器图形界面可对抓料器进行设置、调试。状态检测


适合上下料、搬运、切割、点胶、测量、装配及焊接应用。此外,该机器人采用“所编即所得”的编程机制,尽可能缩短了编程时间和周期时间。当新程序或新产品上线时,上述编程性能均有助于加快调试过程、缩短停线时间
采用优化设计,机身紧凑轻巧,加速度迅速,结合其运行速度,所获周期时间与行业标准相比可缩减25%。操作中,机器人在避绕障碍物和跟踪路径时,可始终保持最高加速度,从而提高产品与效率
大工作范围,能实现到达距离,周期时间、辅助设备等诸方面的综合优化。该机器人可灵活采用落地、斜置、半支架、倒置等安装方式,为模拟工艺布局提供了便利
占地面积小,轴转座半径短,后方肘部纤细,上下臂小巧,手腕紧凑,在规划生产单元的布局时,可以与机械设备靠得更近,从而缩小整个工作站的占地面积,提高单位面积产量,推升工作效率
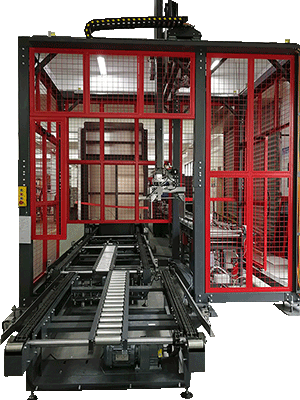
兼容多种码垛形式
低进料,码垛层数更多
栈板自动定位
单板、夹抓、吸盘通用
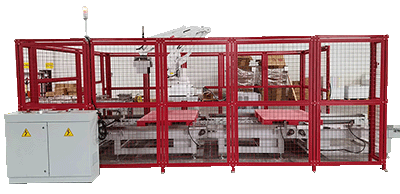
设置安全防护网
采用PLC控制,不同的码垛形式,提前预设;手柄操作,方便掌握
进料与出料单独作业,做到输送顺畅
整机配备安全防护网
低位进料,在有限的楼层高度,更多的码垛层数
进口电机,运行稳定无噪音
栈板自动定位,垛形整齐
根据不同类型产品,可通用单板、夹抓、吸盘等不同夹具来完成
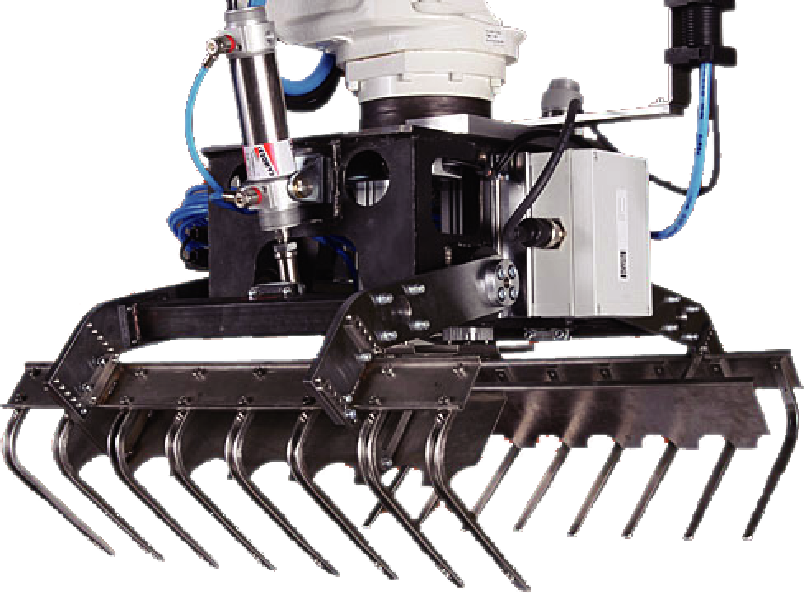
以重型箱为目标应用
轻量化设计,结构精简
配备传感器检测物料是否到位,特殊弯钩设计适合不同尺寸箱盒
配备安装板及全套管线,即插即用
搭配示教器图形界面可对夹具进行设置、调试、状态检测
 关闭弹窗
关闭弹窗
关闭弹窗
关闭

 扫码关注我们
扫码关注我们
Copyright 2022 苏州市盛百威包装设备有限公司 苏ICP备13017017号
 0512-66166628
0512-66166628
 sbwpack@sbwpack.com
sbwpack@sbwpack.com
 江苏省苏州市高新技术开发区浒关工业园浒杨路26号
江苏省苏州市高新技术开发区浒关工业园浒杨路26号



